[摘要] 随着世界各国对环保问题的重视和新能源技术的发展,电动飞机这一产业应运而生。面对未来移动通信技术的发展和空中交通的普及,电动飞机将运行在十分复杂的电磁环境中。全电飞机完全依赖电子系统的控制,再加上大功率电动力系统,电动飞机将经历更高水平的电磁干扰影响。因此,为了保证电动飞机安全运行,必须对当前航空航天标准的适用性进行研究,为后续电磁兼容标准的制定奠定基础。本文介绍了对未来电动飞机电磁环境的展望以及可能遇到的电磁兼容问题,并对相关电磁兼容标准进行了简要评估。
[关键词] 电动飞机;电磁环境;电磁兼容
柳海明
高级工程师,担任全国无线电干扰标准化技术委员会A分会及D分会委员,参与多项国家标准、国际标准制修订工作,承担国家级、省部级科研课题多项,发表学术论文20余篇。
引言
随着航空业的迅速发展,其所带来的环境问题也逐渐受到重视。航空业占全球二氧化碳排放量的2%和所有温室气体的3%,从长远来看,预计每年平均增长4%至5%。国际民航组织预计,到2050年,航空业二氧化碳的排放量将增加约三倍,这将占全球碳排放量的25%。为了遏制这种趋势,世界各国都在积极采取行动,将2050年净零碳排放作为目标,为全球航空脱碳做出努力。在此背景下,为了降低飞机燃料消耗、运行成本和噪音,电动飞机(AEA)的概念应运而生[1]。
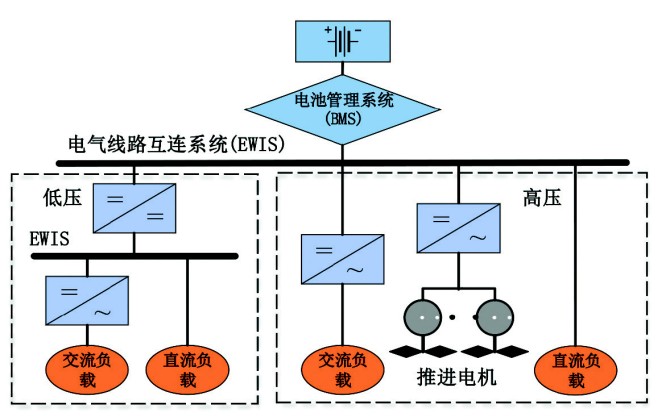
电动飞机结构与传统内燃型飞机相比,最大不同在动力系统上,见图1。电动飞机采用了高功率的电力传动系统来代替传统的飞机引擎,该系统由多个部件组成,如高功率电机、高功率密度转换器、电池和高功率线缆等。除此之外,传统飞机上的的液压、机械和气动系统在电动飞机上均实现了电气化。电动飞机不再需要通过燃烧燃料来为其提供能量,只需通过高压电池组为其提供飞行所需能量。这样的发展趋势使电动飞机对功率的要求更高,其配置和运行也同时面临这多重挑战。
电动飞机内部功率转换器主要依靠功率器件的快速开关来实现。由于功率水平的提高,这就需要更快的开关速度和更小的组件来实现功率密度的提高,这必然会导致强烈的电磁干扰。而在实际运行过程中,这种强电磁干扰是不被允许的,因为这很可能会影响航空电子设备的正常工作。此外,电动飞机外部也时刻遭受着无线电、雷击和移动通信网络的影响。由于电动飞机仅依靠电能提供动力,这意味着电动飞机对于内外环境中电磁干扰的抗扰度有着更高的要求。为了提升飞机的安全性,确保电动飞机的电磁兼容性是非常重要的。
本文以电动飞机电力系统为出发点,着重分析了高度电气化所带来的电磁干扰(EMI)问题,比较了传统燃油飞机和电动飞机所经历的电磁环境的不同,重点阐述了全电飞机电磁环境的复杂性,对全电飞机内部的主要电磁干扰源进行了讨论,详细分析了RCTA DO-160G《航空电子设备环境条件和测试程序》电磁兼容部分对于全电飞机的适用程度,为后续全电飞机适航标准的制定提供参考。
1 电磁环境分析
所有电子设备都是随着科技的进步而不断向前发展的,因此,即使不考虑电动飞机的电磁环境,未来传统飞机的电磁环境也会随着电子设备发展而不断改变。在制定标准的过程中,标准所适用的环境条件往往包含各种因素。随着技术的不断发展,设备所处的环境也日益复杂,标准也会呈现出不适用性,需要及时更新,以确保设备在日益复杂的环境影响下也能正常工作。由于电动飞机尚处于研发阶段,并未投入市场运营,这就需要在制定电动飞机电磁兼容相关标准时,不能仅参考当前燃油飞机所面对的电磁环境,更要充分考虑未来电动飞机电磁环境的发展趋势。否则,当电动飞机真正投入市场运营时,所制定的标准可能已经无法适用。
2 电动飞机与电磁兼容
图 1 电动飞机电气系统架构
与传统飞机不同,电动飞机采用完全电气化的系统。这意味着传统设备接口被数字接口所取代,燃料推进系统被复杂的大功率电力动力系统所取代。虽然机载服务负载(如娱乐和餐饮系统)、点火装置和一些其他电气电子系统代表了传统飞机的电磁兼容范畴,但是电动飞机呈现了更加复杂的电磁环境。在电动飞机的电推进系统中,面对高功率推进要求,其电推进系统所分配的额定功率要远大于目前传统飞机电气系统所分配的额定功率,所以电推进系统被定义为全电飞机中最主要的电磁干扰源。
2.1 航空电子设备
传统飞机的操作主要依赖液压、机械和气动系统,电动飞机的可操作性则完全依赖于电气系统和设备,这些系统和设备在飞机内都有各自的功能。航空电子设备主要执行通信、导航和飞行控制等功能,这些功能通常是飞机安全运行的关键,因为从飞行员在危险情况下进行紧急起飞和降落,到飞行过程中的通信和环境信息收集,都需要依赖航空电子设备的正常运行。所以当考虑到全电飞机中此类航空电子设备的电磁兼容场景时,通常会考虑关键功能无法工作的情况,保证设备的抗扰性满足安全飞行的要求。
飞行控制被定义为主要飞行控制和辅助飞行控制。主要飞行控制负责实现飞机的机动性,控制飞机沿俯仰(横向)、侧滚(纵向)和偏航(垂直)三轴的运动;辅助飞行控制主要包括配平片、前缘襟翼、后缘襟翼、扰流板以及前缘缝翼,可以使飞行员实现更好的飞行机动性。为了执行以上功能,飞机需要通过对电作动器进行操作[2],这些电作动器也用于制动、起落架控制和其他功能。但是,电动静液压作动器(EHAs)和机电作动器(EMAs)都是由电机和逆变器组成的,这些元件的电磁干扰特性需要在全电飞机环境下进行研究。无刷直流电机(BLDC)由于其可靠性和高精度可控性,常用于电作动器的实现。在文献[3]中,无刷直流电机虽然在低压场景下运行,但仍然产生显著的辐射排放。因此,在制定全电飞机相关标准时,必须对其使用情况进行评估,并将其定性为系统内电磁干扰源之一。除此之外,无刷直流电机不会持续在稳态条件下运行,应当考虑到其可变性。
辅助飞行控制与主要飞行控制相比具有操作风险低的特点,故在电磁干扰敏感度方面不太受关注。考虑到飞机可以仅依靠主要飞行控制来完成飞行,所以电磁干扰问题不会作为重要的安全问题来进行考虑。eVTOL(电动垂直起降飞行器)与传统推进式飞机相比,具有独特的飞行控制特性。它们依赖于每个电机的速度变化来提供不同的扭矩和不同方向的动力配置[4]。虽然机动机制有很大的变化,但主要飞行控制和辅助飞行控制的变化,并不影响仅将主要飞行控制的电磁干扰问题作为重要安全问题进行考虑。此外,由于eVTOL飞控系统同样具有电传飞行控制系统的特征,必须给予同等水平的电磁兼容标准考量。
2.2 能量存储系统:电池
电池是电动飞机技术中最主要的一个挑战,但是目前电池还达不到商业运行的最低能量密度要求。与航空燃料约12kWh/kg(千瓦时/千克)[5]相比,目前的商业技术只能提供大约250Wh/kg(瓦时/千克),这难以满足通航需求。这也是限制电动飞机进入市场的主要原因。在文献[6]中,预估500Wh/kg是成功将电动飞机作为一种可行的商业竞争技术引入市场所需的最低要求,预计到2030年才会实现。
电动飞机的储能系统不仅包括电池,还包括电池管理系统(BMS)内的模块控制单元(MCU)、DC/DC变换器、内部充电器等。为了满足高功率、宽飞行范围和长生命周期的要求,能量储存系统正朝着高电压解决方案发展。然而在三相交流系统和高压直流系统中,高电压意味着更高程度的辐射发射。此外,文献[7]中提到,BMS中的集成电路(IC)很可能被输入端和数字通信线缆上的电磁干扰破坏。因此,在制定标准时,需要对储能系统前端集成电路进行抗扰度试验。
电池是功率变换器电磁干扰传播路径的一部分。只有充分了解共模(CM)和差模(DM)阻抗分布,才能正确建模EMI噪声传播路径和寻找有效减缓技术。文献[8]中证明了电磁干扰还可以以热崩溃的形式导致电池损坏。因为电池类似于电容器与电线组合起来形成了一个谐振电路,当由于电磁干扰引起的高频电流以谐振频率流入电路中时,会导致电池的热失控,一些航空电子设备也会因此收到影响。此外,由于电流流经堆叠层而产生的辐射和电池内部阻抗会因为电池技术的选择及其保护措施存在差异。目前,还没有针对高功率传输电池的航空航天标准。
2.3 功率变换器
在电动飞机中,由于电动力系统的加入,新引入的变换器主要位于电池和电机接口[9],它们必须符合大功率的要求,因为电机的功率通常在几百千瓦甚至兆瓦。除了大功率变换器外,其他弱电设备也需要独有的功率变换器,功率与电机侧转换器相比有显著的降低。
将储存的电力通过交流或者直流电进行分配,会影响配电网各个部分使用的电缆类型、滤波器的尺寸、重量以及散热。由于变压器尺寸和重量的减小,传统飞机上一直使用的是400Hz(赫兹)交流电[10]。随着大功率半导体器件的引入,变压器将不再是必要的,可以通过调制来输出不同频率的交流电。但是大多数设备是根据传统的400Hz交流电进行设计和测试的,如果偏离了惯例,可能会对二次配电系统带来挑战。因此,在制定标准时应考虑到不同基频的使用。
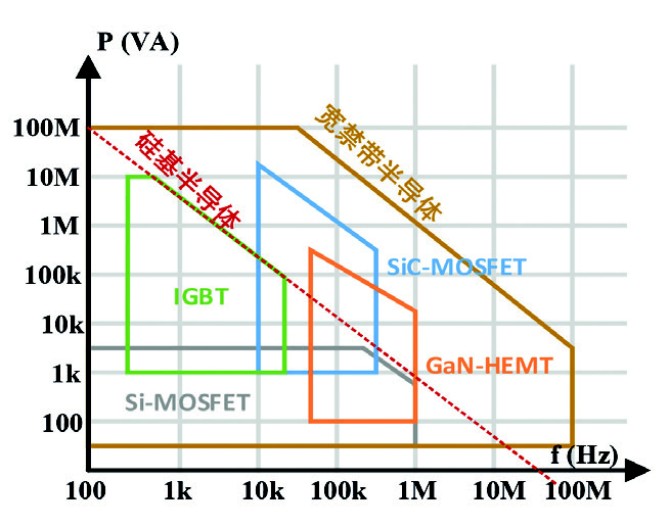
图 2 宽禁带半导体与硅基半导体
目前,大多数航空电子设备采用的是400Hz交流电,其在内部会将交流电转化为直流电。因此,预计在此类应用中的整流器会完全被DC/DC转换器所取代。在这种情况下,对电磁干扰影响最大的因素将是功率器件的开关频率和电路中的谐波分量。逆变器(DC/AC)将被用于驱动电机,它们将产生三相或者更多相,这可以对电机速度和扭矩进行精确控制[11]。 IGBT(是一种功率器件,用于输出大功率电源,驱动电机等负载)的使用,是逆变器普及的主要原因之一。 IGBT的高速开关以及由此带来的开关损耗和逆变器尺寸的减小,是这种功率器件应用的最大好处之一。与IGBT相比,宽禁带器件(如SiC、GaN等)可以实现更高的效率、功率密度、工作温度上限以及更快的开关频率,如图2所示。宽禁带半导体允许逆变器在高开关频率下工作,这提高了驱动系统的性能,同时也有利于减少电机的损失,这也使得逆变器的电磁干扰水平更高[12]。因此,控制逆变器电磁干扰,尤其是由于共模电流引起的电磁干扰,是十分重要的。
随着新能源技术的不断发展,电力运输有向高功率密度发展的趋势。在飞机上,由于可用空间有限和重量的减轻,这一点更加明显。目前,国内外对于变换器中电磁干扰的缓解和控制已经进行了大量的研究,基本上已经涵盖了所有类型。此外,电动飞机上关于功率变换器电磁干扰最主要的挑战,还是所有变换器组合起来所带来的电磁干扰。
2.4 电气线路互连系统(EWIS)
随着飞机电气化和智能化程度的提升,飞机设计的复杂度也相应提升,电气线路也变得更加复杂,各类线路的故障率大大增加,时刻影响着飞机的安全运行。2007年,美国联邦航空局将电气线路互连系统(EWIS)作为独立的H部分纳入运输机FAR25《联邦航空条例第25部——运输类飞机适航标准》。我国于2011年在CCAR-25《运输类飞机适航标准》修订版中引入了相关要求和标准,并且在C919和其他机型中实施。EWIS作为一个独立的综合系统,具有集成度高、安装环境复杂、元器件选择多、系统数据庞大和技术更新迭代块等特点[13]。电动飞机的EWIS相对于传统飞机变得更加精密,由于空间的局限性,其复杂程度也会更高。因此,在考虑全电飞机的电磁兼容问题时, EWIS的安全性设计和分析就显得尤为重要。
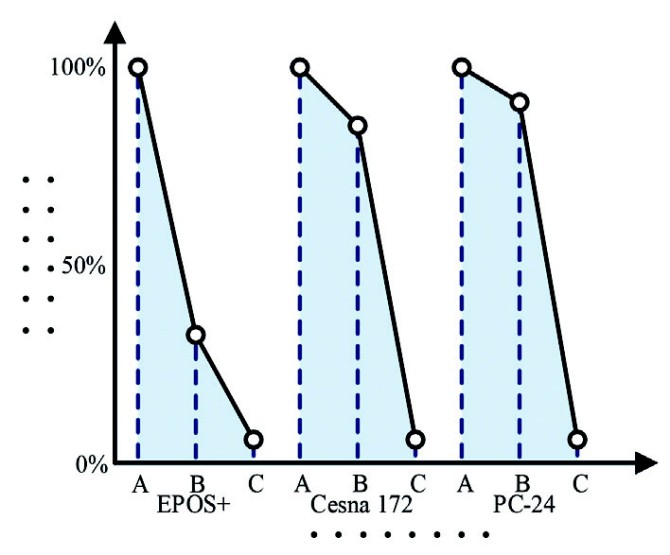
图3 不同飞行阶段功率占比(A:爬升, B:巡航,C:下降)
机载电子设备大多数电磁干扰是由飞机EWIS接线不当引起的严重电磁耦合导致的,随着全电飞机电气化程度的提升,这个问题会更加严重。电动飞机上目前最常见的动力系统由电池、逆变器和电机组成,为了实现飞行,需要高电压和电流水平。其中接口、线缆和其他结构的非理想行为,将充当电磁干扰的传播路径。由于体积有限,这将导致EWIS在设计阶段的电磁干扰分析相当复杂,难以预测[14]。在电动飞机中,预计会有额外的布线路径,无论是用于通信还适用于电力传输,此类电缆都是传导干扰传播的主要路径。布线的增加也会使高强度辐射场(HIRF)所带来的干扰通过辐射耦合的方式至其他系统,影响系统的正常运行。考虑到线缆的分布和空间有限,所产生的串扰可能会加剧。此外,由于飞行模式切换(爬升、巡航和下降)致功率水平的波动,可能会使得分布在EWIS中的电压和电流产生突变[15],这会对机内电磁环境产生极大影响,这也是在制定标准时需要考虑到的。图3为EPOS+、 Cesna 172、PC-24三款飞机分别在爬升、巡航和下降阶段推进系统所用功率占额定功率的比重。
3 总结
本文对电动飞机商业化部署所面临的电磁兼容要求和标准化挑战进行了概述,对当下飞机和未来的电磁环境进行了简要讨论,并针对电动飞机上新引入的电磁干扰源和受干扰设备进行了深入分析,包括大功率电池、功率变换器、电机和电气线路互联系统。此外,还对基础技术的发展进行了预测,特别是大功率电池,预计在到2030年,500Wh/kg的电池技术将发展成熟,并且可以应用在电动飞机上。与传统飞机进行比较,分析电动飞机内部结构(系统和部件)和电磁环境的变化,预测其未来可能遇到的挑战。
电池所能提供的能源有限,并且需要通过功率变换器为所有设备供电。为了提高能量利用效率,宽禁带半导体是一个很好的选择。但宽禁带半导体快速开关所带来的高dv/dt(是电压随时间的变化率,是求导数的写法),会通过寄生效应为其他系统带来干扰。电动飞机内空间有限,完全电器化会产生EWIS布线密集的问题,而高强度辐射场(HIRF)所带来的干扰,可能会通过辐射耦合的方式干扰其他系统的正常工作。此外,航空电子设备和BMS有可能由于电磁干扰无法正常工作,影响飞机的正常运行和能源供应。在制定标准时,需要考虑以上问题。
参考文献
[1].杨凤田,范振伟,项松,刘远强, 赵为平.中国电动飞机技术创新与实践[J].航空学报,2021,42(03):7-12.
[2].Barzkar and M. Ghassemi, "Electric Power Systems in More and All Electric Aircraft: A Review," in IEEE Access, vol. 8, pp. 169314-169332, 2020, doi: 10.1109/ACCESS.2020.3024168.
[3].L . Dorn - Gomba, J. Ramoul, J. Reimers and A. Emadi, "Power Electronic Converters in Electric Aircraft: Current S t a t u s , C h a l l e n g e s , a n d Eme r g i n g Technologies," in IEEE Transactions on Transportation Electrification, vol. 6, no. 4, pp. 1648-1664, Dec. 2020, doi: 10.1109/TTE.2020.3006045.
[4].Cao W, Mecrow B C, Atkinson G J, et al. Overview of electric motor technologies used for more electric aircraft (MEA)[J]. IEEE transactions on industrial electronics, 2011, 59(9): 3523-3531.
[5] .Y. Hua n g , Z . L i u a n d Y. L i u , "Re s ea r c h o n CC A R Se c t i o n 2 5 .1431 an d EMC C omp lian ce Ve r if ic at io n Technology," 2022 IEEE 4th International Conference on Civil Aviation Safety and Information Technology (ICCASIT), Dali, China, 2022, pp. 25 -29, doi: 10.1109/ICCASIT55263.2022.9987087.
[6].J. Benzaquen, J. He and B. Mirafzal, "Toward more e le c t r ic powe r t r ains in aircr af t : Technical challenge s and advancements," in CES Transactions on Electrical Machines and Systems, vol. 5, no. 3, pp. 177-193, Sept. 2021, doi: 10.30941/CESTEMS.2021.00022.
[7].X. Mengkai, S. Jie, M. Qingtang and H. Dingbang, "Aircraft hydraulic power s ys tem design for low temper ature," CSA A/IET International Conference on Aircraft Utility Systems (AUS 2020), Online Conference, 2020, pp. 1016 -1020, doi: 10.1049/icp.2021.0402.
[8].A. -Q. Nguyen, A. Amrhar and R. Landr y, "Direc t RF Sampling Avionic s A rchitec ture for f uture multi - s ys tem integr ated Av ionic s ," 2018 16th IEEE International New Circuits and Systems Conference (NEWCAS), Montreal, QC , Canada, 2018, pp. 61- 65, doi: 10.1109/NEWCAS.2018.8585695.
[9]. R . P e r e z , " I n t e g r a t i o n o f Ana l y s e s in an EMC Cont ro l Pla n f or Avionics Hardware in Space Applications," 2019 IEEE International Symposium on Electromagnetic Compatibility, Signal & Power Integrity (EMC+SIPI), New Orleans, LA, USA, 2019, pp. 272-277, doi: 10.1109/ISEMC.2019.8825216.
[10]. Steinberg M. Historical overview of research in reconfigurable flight control[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2005, 219(4): 263-275.
[11]. Giangrande P, Madonna V, Sala G, et al. Design and testing of PMSM for aerospace EMA applications[C]//IECON 2018-44th Annual Conference of the IEEE Industrial Electronics Society. IEEE, 2018: 2038-2043.
[12]. Xu Y, Tang Y, Zhu J, et al. Control of a BLDC motor for electromechanical cctuator[C]//2008 International Conference on Electrical Machines and Systems. IEEE, 2008: 3266-3269.
[13]. Lee J, Jung K, Park S. Simulation of radiated emissions from a low voltage b l d c moto r [C] // 2 01 8 In te r nat i o na l Symposium on Antennas and Propagation (ISAP). IEEE, 2018: 1-2.
[14]. P. Giangrande, A. Al-Timimy, A. Galassini, S. Papadopoulos, M. Degano and M. Galea, "Design of PMSM for EMA Employed in Secondar y Flight Control Sy s tems ," 2 01 8 IEEE In te r nat i o na l Conference on Elec trical Sys tems for Aircraft, Railway, Ship Propulsion and Road Vehicles & International Transportation Electrification Conference (ESARS-ITEC), Nottingham, UK, 2018, pp. 1-6, doi: 10.1109/ESARS-ITEC.2018.8607467.
[15]. N. Swaminathan, S. R. P. Reddy, K. RajaShekara and K. S. Haran, "Flying Cars and eVTOLs—Technology Advancements, Powertrain Architectures, and Design," in IEEE Transactions on Transportation Electrification, vol. 8, no. 4, pp. 4105-4117, Dec. 2022, doi: 10.1109/TTE.2022.3172960.